戴世智能是一家聚焦于自动驾驶领域,为行业提性能领先和质量过硬的量产级高精度定位解决方案。自2015年成立以来,先后推出了针对无人机和汽车自动驾驶应用研发了高精度组合惯导、IMU模组和测试软件套件等行业领先的产品。
上海戴世智能科技有限公司副总经理&联合创始人陆海峰以《P-Box的发展与应用2022》为主题展开演讲,以下是演讲内容整理:

上海戴世智能科技有限公司副总经理&联合创始人陆海峰
本次演讲分为行业背景、高精度IMU性能需求、高精度IMU标定技术、About 戴世、IFS3000 ADAS测试套件几个部分。
IMU性能需求
2020年以后,L2及L2+级别的辅助驾驶呈现出燎原之势,高精度组合导航系统主要由GNSS卫星信号接收、RTK算法和IMU惯性导航单元组成,其中GNSS/RTK在开阔场景精度高,却在城市复杂工况下缺少鲁棒性,而IMU可以克服GNSS/RTK定位信号的此类缺陷,同时,和视觉和激光雷达形成的SLAM技术,进一步使车辆具备全天候高精度定位能力。
高精度IMU的在性能需求上有一个特点,那就是没有止境,但是在汽车行业需要讨论“good enough”的平衡性问题。接下来是我们所做的一个性能对比试验,意在说明IMU 精度对VSlam/VIO的性能影响。实验采用不同精度等级的IMU产品匹配双目视觉,进行一个VSlam/VIO的实时建图及轨迹绘制测试。
其中Sample A选择的是3.5°/h的零偏不稳定性,Sample B采用的是6.3°/h的零偏不稳定性,同时,两种样品都配有正交性校准的与否的不同边界条件排列组合。结果显示,在不同精度等级IMU的状态下,随着距离的增加(单圈约550m),两个样本轨迹绘制表现也不同。我们进行了五十次的重复实验去定量比较这种差距,发现Sample A的精度和重复性有显著优势,其误差在累积后表现出来的稳定性较好,在没有轮速类里程计辅助的场景下,依旧可以实现五米左右的箱形图分布。

图片来源:戴世智能
IMU可以弥补GNSS信号不稳定的情况,这主要是因为无 GPS 信号环境时,定位依靠的是 DR 算法(Dead Reckoning)。DR算法是指已知上一时刻导航状态(状态、速度和位置),根据三维惯性传感器推算到下一时刻的航位状态。DR 算法包括姿态编排和位置编排两个部分,姿态编排使用的是 AHRS融合算法,处理后输出车机姿态信息。
在出现摄像头失效、卫星型号被遮挡的情况时,就需要使用IMU+轮速+高精地图(状态、速度和位置)进行定位,也就是使用DR算法进行定位,而DR 算法精度主要取决于 IMU(陀螺仪和加速度计)和测速仪的误差,惯性传感的误差将引起位置误差随时间的二次方增长,测速仪误差将引起位置误差随时间线性增长。
高精度IMU标定技术
说到性能就会讲到标定和校准,车用场景下高精度IMU标定技术的要求越来越高。以陀螺仪的标定校准为例,下图是比较经典的陀螺仪校准模型中的主要修正参数。校准过程中,需要通过高精度标准装备进行大批量的数据采集、矩阵求解计算,最后回灌入产品中,让每一个芯片都有独立的校准状态。经过标定后可以将零偏随温度的漂移降低到0.001dps,提升了1-2个数量级;标度因数误差通过标定可以在传感器全量程内,将误差范围从3%缩小到0.3%,提升了1数量级。
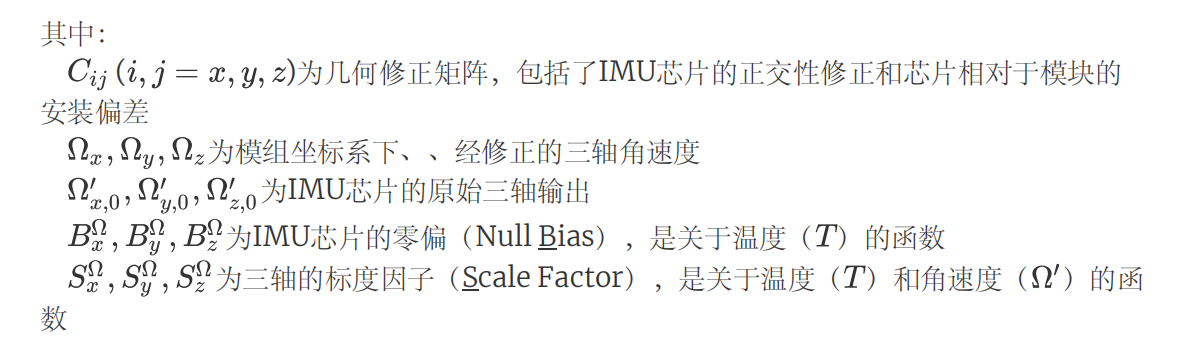
图片来源:戴世智能
总结一下,校准和不校准的成本投入相差不到30%,然而可以使惯性导航器件的精度有1-2个数量级的提升,这对于整个工业界来说是合理的、也是值得投入的环节。此外,戴世智能也会对交付后的基础器件产品有检验,确保产品的稳定性,验证其校准参数是否起效。例如,以下展示的是通过不同温度循环曲线的对比,可以从中辨传感器表现否有重复性。
戴世智能会对所有器件做严苛的产品测试,比如短短的几十秒之内快速升降温测试,列出温度循环曲线的对比图,考验高温度梯度场景下产品的形变、应力对零偏稳定性的影响,并对传感器校准调试到重合度符合标准之后再进行标定。
戴世智能公司介绍
戴世智能是一家聚焦于自动驾驶领域,为行业提性能领先和质量过硬的量产级高精度定位解决方案。自2015年成立以来,先后推出了针对无人机和汽车自动驾驶应用研发了高精度组合惯导、IMU模组和测试软件套件等行业领先的产品,在限定场景和ADAS测试领域拥有广泛的客户群,深受客户的好评。
戴世智能在高精度IMU和组合惯导产品具有核心技术积累,按照德国大众汽车标准开发和验证产品,装备有全新的第三代智能化惯性产品生产线。凭借领先的技术和七年的产品迭代积累,逐渐成为国内外客户的首选供应商。
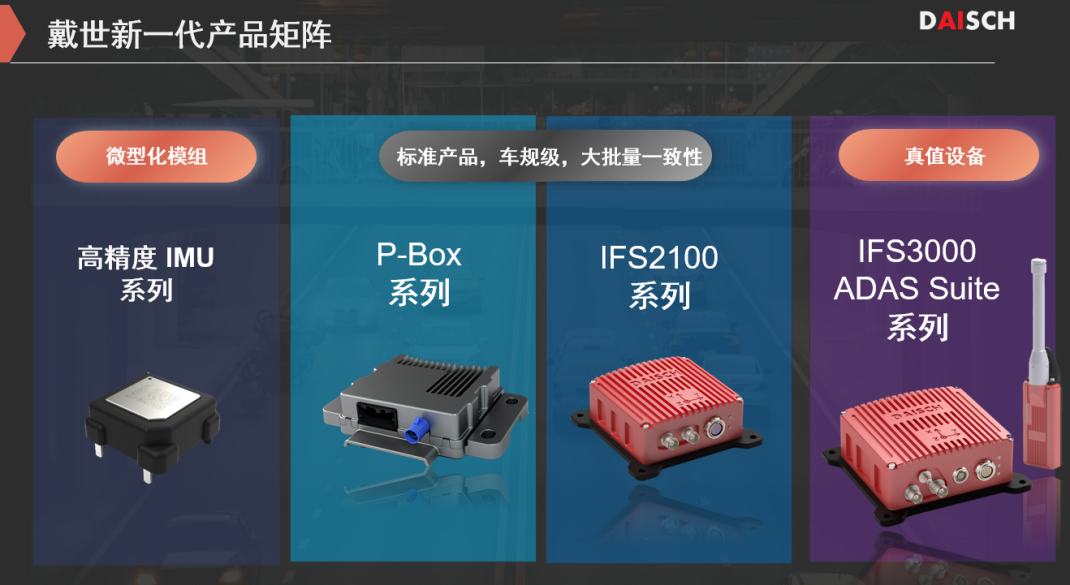
图片来源:戴世智能
最后介绍IFS 3000系列产品中ADAS Suite组网测试套件,组网测试是组合导航系统的衍生应用,ADAS开发时如何减少定位和真实场景的误差?比如在做毫米波雷达验证和车道线保持时,系统往往需要动态地获得多个目标之间的相对位置关系,要保持不同器件时间延迟的同步,从而做到足够精度,其实还有一定的门槛和困难。因此,戴世智能提供的IFS 3000 ADAS Suite是一套软硬件一体化的系统,它可以帮助工程师非常方便地测量V2V及V2L的点对点、轮廓与轮廓动态测量、支持Slip Angle 车辆运动侧滑角测试、Euro NCAP ADAS 功能验证、驾驶机器人接口、也能进行室内定位测试。
(以上内容来自上海戴世智能科技有限公司副总经理&联合创始人陆海峰于2022年9月14日由盖世汽车主办的2022第四届自动驾驶地图与定位大会发表的《P-Box的发展与应用2022》主题演讲。)



发表评论